It is a measure of an object's resistance to changes in its rotational motion.
Moment of Inertia: Formulae for Different Shapes
Estimated reading time: 8 minutes
The moment of inertia is a fundamental concept in rotational dynamics. It quantifies an object’s resistance to changes in its rotational motion and depends on both the mass of the object and the distribution of that mass relative to the axis of rotation. Consequently, in this article, we will explore the concept of moment of inertia, derive its mathematical expressions for common shapes, and discuss important theorems like the Parallel Axis Theorem and the Perpendicular Axis Theorem.
What is Moment of Inertia?
The moment of inertia ( ) is a measure of an object’s resistance to changes in its rotational motion. That is, it depends on the mass of the object and the distribution of that mass relative to the axis of rotation. Hence, farther the mass is from the axis of rotation, the greater the moment of inertia.
) is a measure of an object’s resistance to changes in its rotational motion. That is, it depends on the mass of the object and the distribution of that mass relative to the axis of rotation. Hence, farther the mass is from the axis of rotation, the greater the moment of inertia.
Mathematical Interpretation of Moment of Inertia
If a system of consists of discrete point masses, the moment of inertia is given by:
![\[I = \sum_{i} m_i r_i^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-6171464676e4ab30bd600d5efc4ab52b_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
where:
 is the mass of the -th particle,
is the mass of the -th particle,- is the perpendicular distance of the -th particle from the axis of rotation.
 is the mass of the
is the mass of the  -th particle,
-th particle, is the perpendicular distance of the
is the perpendicular distance of the If a system of consists a continuous mass distribution, the moment of inertia is calculated using integration:
![\[I = \int r^2 \, dm\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-e4faf9d32e018c40ab7d93bc851fcdf0_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
where:
- is an infinitesimal mass element,
- is the perpendicular distance of from the axis of rotation.
Parallel Axis Theorem of Moment of Inertia
The Parallel Axis Theorem relates the moment of inertia of an object about an axis to its moment of inertia about a parallel axis passing through its center of mass. Since most objects asymmetric about most arbitrary axes, this theorem is an extremely useful theorem. That is mathematically expressed as:
![\[I = I_{\text{cm}} + Md^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-d9f2eafd33fe8525a85f1fb36ee08a20_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
where:
- is the moment of inertia about the new axis,
- is the moment of inertia about the center of mass,
- is the total mass of the object,
- is the perpendicular distance between the two axes.
 is the moment of inertia about the center of mass,
is the moment of inertia about the center of mass, is the perpendicular distance between the two axes.
is the perpendicular distance between the two axes.Also Read: A Guide to Practical Physics
Perpendicular Axis Theorem of Moment of Inertia
The Perpendicular Axis Theorem applies to planar (2D) objects and states that the moment of inertia about an axis perpendicular to the plane of the object is the sum of the moments of inertia about two mutually perpendicular axes lying in the plane. Since most objects asymmetric about most arbitrary axes, this theorem is also an extremely useful theorem. That is expressed as:
![\[I_z = I_x + I_y\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-f13281f837d6033d716130aabbad8a43_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
where:
- is the moment of inertia about the perpendicular axis,
- and are the moments of inertia about the in-plane axes.
 is the moment of inertia about the perpendicular axis,
is the moment of inertia about the perpendicular axis, and
and  are the moments of inertia about the in-plane axes.
are the moments of inertia about the in-plane axes.Moment of Inertia of Common 2D Shapes
Moment of Inertia of various shapes depends on mass, distribution of mass and the location of axis of rotation. Hence, using Symmetry, Parallel Axis Theorem and Perpendicular Axis Theorem, it can be calculated for various shapes.
Thin Rod
If one considers a thin rod of length  and mass
and mass  , rotating about an axis perpendicular to the rod and passing through its center, the moment of inertia can be easily calculated.
, rotating about an axis perpendicular to the rod and passing through its center, the moment of inertia can be easily calculated.
Derivation:
Firstly, divide the rod into small mass elements  of length
of length  .
.
The mass per unit length is  , so
, so  .
.
Then the distance of each element from the center is  , where ranges from
, where ranges from  to
to  .
.
Consequently, by definition, the moment of inertia is:
![\[I = \int_{-L/2}^{L/2} x^2 \, dm = \lambda \int_{-L/2}^{L/2} x^2 \, dx\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-90d305717b182c173838fc2f5c24f444_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Then solving the integral:
![\[I = \lambda \left[ \frac{x^3}{3} \right]_{-L/2}^{L/2} = \lambda \left( \frac{L^3}{24} + \frac{L^3}{24} \right) = \frac{\lambda L^3}{12}\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-076e69aaf68d7534e38dbbed10ba386a_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Finally, substituting :
![\[I = \frac{1}{12}ML^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-65616266aa8b898080a568d8931ed0c1_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Hence, Moment of Inertia:
![\[I_{\text{cm}} = \frac{1}{12}ML^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-66ab3b95e4c09bb8d29941ce487d1f47_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
If the axis is at one end of the rod, using the Parallel Axis Theorem:
![\[I = I_{\text{cm}} + M\left(\frac{L}{2}\right)^2 = \frac{1}{12}ML^2 + \frac{1}{4}ML^2 = \frac{1}{3}ML^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-d7def2be03e0ddb5b3cf020ecbf83045_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Thin Ring
For a thin ring of mass and radius  , rotating about an axis perpendicular to the plane of the ring and passing through its center.
, rotating about an axis perpendicular to the plane of the ring and passing through its center.
Derivation:
Firstly, remember that all mass elements are at a distance from the axis.
Hence, the moment of inertia is:
![\[I = \int R^2 \, dm = R^2 \int dm = MR^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-19c70c2a1956eb43bf1521f17908f67a_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Hence, Moment of Inertia:
![\[I = MR^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-504e84baf59a5d3fc68f84aee8db49c4_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Solid Disc
For a solid disc of mass and radius , rotating about an axis perpendicular to the plane of the disc and passing through its center.

Derivation:
Firstly, divide the disc into thin rings of radius  and thickness
and thickness  .
.
Then the mass of each ring is  , where
, where  is the mass per unit area.
is the mass per unit area.
Then, the moment of inertia of each ring is  .
.
Integrate over the entire disc:
![\[I = \int_0^R \sigma \cdot 2\pi r^3 \, dr = 2\pi\sigma \int_0^R r^3 \, dr\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-05b5b8ce018e0aae6e8750828824c963_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Then solving the integral:
![\[I = 2\pi\sigma \left[ \frac{r^4}{4} \right]_0^R = \frac{\pi\sigma R^4}{2}\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-462cc61f6cd4a019c5c08936aa3b80ec_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Finally substituting :
![\[I = \frac{1}{2}MR^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-d58575f29b58715cce83b5efc4ba629d_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Hence, Moment of Inertia:
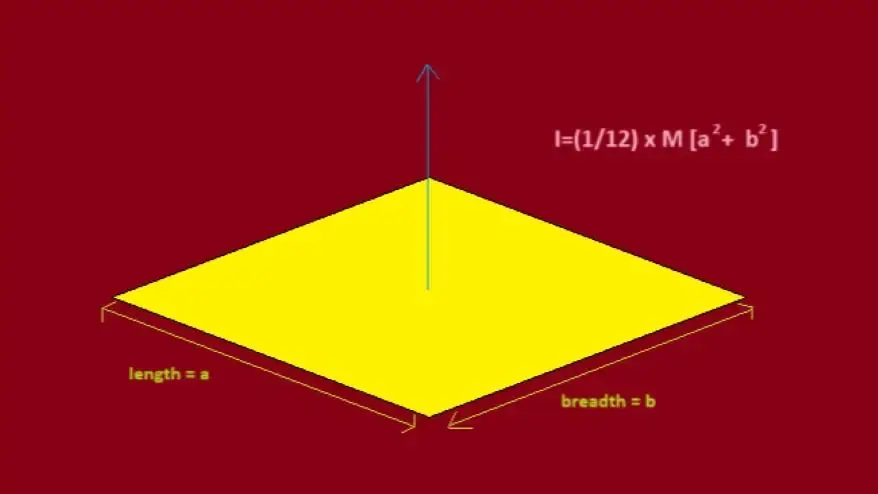
Rectangular Lamina
For a rectangular lamina of mass , length  , and width
, and width  , rotating about an axis perpendicular to the plane and passing through its center.
, rotating about an axis perpendicular to the plane and passing through its center.
Derivation:
Firstly, use the Perpendicular Axis Theorem:  .
.
Hence, for a thin lamina,  and
and  .
.
Thus:
![\[I_z = \frac{1}{12}M(a^2 + b^2)\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-e8bf1b737f862794db99ac72e78c357f_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Hence, Moment of Inertia:
![\[I = \frac{1}{12}M(a^2 + b^2)\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-36a06637ba51ae5908353acbef6f283a_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Triangular Lamina
For a triangular lamina of mass and base , rotating about an axis perpendicular to the plane and passing through its centroid.
Derivation:
Since we know that the centroid of a triangle is located at a height  from the base, where
from the base, where  is the height of the triangle.
is the height of the triangle.
Then using calculus and integration, the moment of inertia about the centroid is:
![\[I = \frac{1}{36}Mb^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-bcd422b3b459a921a1e4bb926c454075_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Hence, Moment of Inertia:
Moment of Inertia of Common 3D Shapes
Hollow Cylinder
For a hollow cylinder of mass , inner radius  , and outer radius
, and outer radius  , rotating about its central axis.
, rotating about its central axis.
Derivation:
Firstly, note that the moment of inertia is the difference between the moments of inertia of two solid cylinders of radii and :
![\[I = \frac{1}{2}M_2R_2^2 - \frac{1}{2}M_1R_1^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-750f2a2e0b16c339ab1611030bef43f5_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Since  , and assuming uniform density:
, and assuming uniform density:
![\[I = \frac{1}{2}M(R_1^2 + R_2^2)\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-1fdb1b7cb2ffe903ab91664ff4345e33_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Hence, Moment of Inertia:
Solid Cylinder
For a solid cylinder of mass and radius , rotating about its central axis.
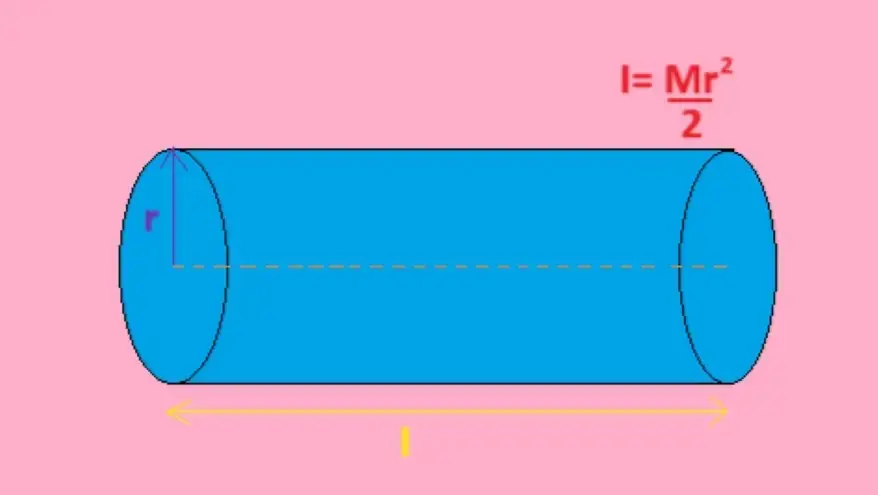
Derivation:
Since we know the Moment of Inertia of a disc, using the result and integrating over the height:
Hence, Moment of Inertia:
Hollow Sphere
For a hollow sphere of mass and radius , rotating about an axis passing through its center.
Derivation:
Firstly divide the sphere into thin rings of elemental mass .
Since surface mass density  is given by:
is given by:
![\[\sigma =\frac{M}{4 \pi R^2}\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-79921fed90713d941ae95aad6d07fbc7_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Then using spherical coordinates and integration:
![\[I = \frac{2}{3}MR^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-77586c1034416e0bb131d7edcca6c7eb_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Hence, Moment of Inertia:
Solid Sphere
For a solid sphere of mass and radius , rotating about an axis passing through its center.
Derivation:
Firstly divide the sphere into thin discs of elemental mass .
Then integrate:
![\[I = \frac{2}{5}MR^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-6ea3f7e0cf6ebc80453f54d73258e733_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Hence, Moment of Inertia:
Cube
For a cube of mass and side length , rotating about an axis passing through its center and perpendicular to one of its faces.
Derivation:
Firstly, using symmetry and integration:
![\[I = \frac{1}{6}Ma^2\]](https://b3411452.smushcdn.com/3411452/wp-content/ql-cache/quicklatex.com-e3fbf7f2f8bec9954765ef3887efefae_l3.png?lossy=2&strip=1&webp=1 "Rendered by QuickLaTeX.com")
Hence, Moment of Inertia:
Table of Summation

Conclusion
In conclusion, moment of inertia is a fundamental concept in rotational dynamics, describing how mass is distributed relative to an axis of rotation. Thus, by understanding the mathematical derivations and applying theorems like the Parallel Axis Theorem and Perpendicular Axis Theorem, we can calculate the moment of inertia for various shapes. Therefore, these calculations are essential for analyzing the rotational motion of objects in physics and engineering.
References
- Mulhayatiah, D., Suhendi, H. Y., Zakwandi, R., Dirgantara, Y., & Ramdani, M. (2018, December 4). Moment of inertia: Development of rotational dynamics KIT for physics students. IOP Conference Series: Materials Science and Engineering, 434(1), 012014. https://doi.org/10.1088/1757-899X/434/1/012014
- Diaz, R., Herrera, W., & Martinez, R. (2005, August 23). Moments of inertia for solids of revolution and variational methods. European Journal of Physics, 27(2). https://doi.org/10.1088/0143-0807/27/2/001
- Villamizar, D. V. (2023). Moments of inertia by summation. Revista Brasileira De Ensino De Física, 45. https://doi.org/10.1590/1806-9126-rbef-2023-0277
- Fäldt, Å., & Fredlund, T. (2023). The gyroscopic effect and moment of inertia. Physics Education, 58(2), 025001. https://doi.org/10.1088/1361-6552/aca73a
Additionally, to stay updated with the latest developments in STEM research, visit ENTECH Online. This is our digital magazine for science, technology, engineering, and mathematics. Further, at ENTECH Online, you’ll find a wealth of information.
- Author
- Latest Posts

Uddhav Thakore is a passionate Physicist with a Master’s degree, specializing in Astrophysics and Quantum Physics. With expertise in Mechanics, Wave Theory, the Standard Model, Engineering Electronics, and Control Systems, Uddhav is dedicated to making complex scientific concepts clear and engaging for a broad audience.



{kind=link}