Adding vibration and sound to robot teleoperation helps operators “feel” tasks, improving precision, confidence, and safety in remote work.
Robot Teleoperation Sensory Feedback: Why Robots Must Feel
Robots are increasingly shaping our world—from factories to hospitals. Many of these machines are controlled remotely, a process called robot teleoperation sensory feedback. Think of it as playing a video game, but instead of controlling a character on a screen, you move a real robot. While this sounds simple, it’s actually quite challenging. Moreover, operators mostly rely on their eyes, yet vision alone is often insufficient.
Why Robot Teleoperation Sensory Feedback Matters
Consider plugging in a phone charger. You don’t just look; you also feel the click. Similarly, touch guides your actions. In remote robot control, operators usually cannot feel these cues. Consequently, they may push too hard or too softly, risking damage to expensive equipment. Therefore, engineers are now exploring ways to add vibration and auditory feedback, making robots more “sensitive” to human senses.
The Problem with Numb Robots
Currently, most teleoperated robots use cameras, and sometimes force feedback, where the joystick pushes back. However, this feedback often misses small but critical details, like the snap of a connector. For instance, imagine assembling a car engine: missing a single click can cause failure. Furthermore, visual feeds may be delayed, blurry, or blocked by the robot’s own arm. In short, operators are often flying blind.
Enhancing Robot Teleoperation Sensory Feedback
To solve this, researchers experimented with remote robotic tactile feedback using multiple senses. Specifically, they combined visual cues, force feedback, vibration, and sound—also called multimodal feedback.
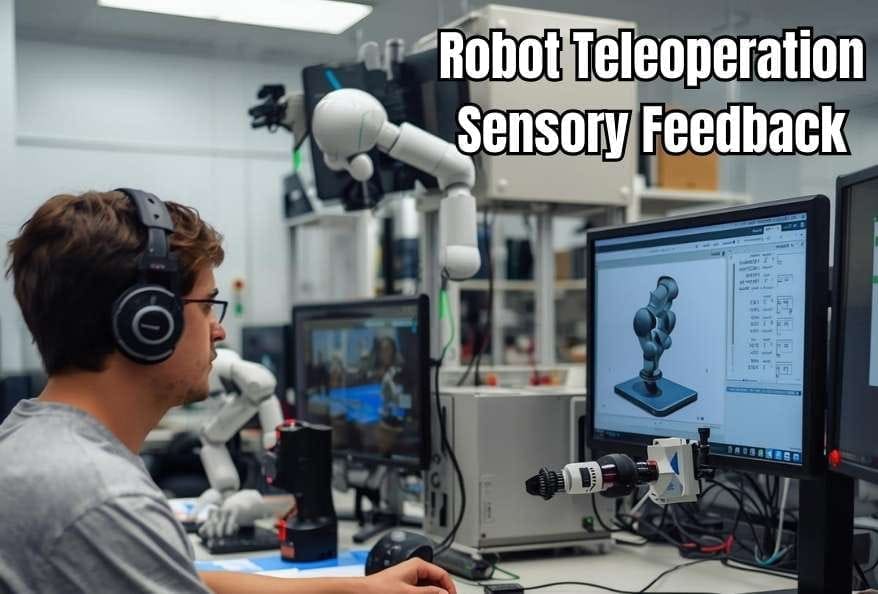
How They Built the System
The team used a robotic arm holding a plastic connector, with operators controlling it via a joystick. In addition, they added:
- Microphones to detect sounds
- Accelerometers to sense vibrations
Then, when the robot felt a click, the joystick vibrated, and a speaker played the sound. As a result, operators could see, feel, and hear the task simultaneously, which significantly improved precision.
Testing Robot Teleoperation Sensory Feedback
University students tested three modes:
- Visual only: Watching the screen
- Visual and force: Watching and feeling resistance
- Full multimodal mode: Visual, force, vibration, and sound
Interestingly, results were clear. Operators performed best with robot teleoperation sensory feedback in Full Mode. Consequently, they could detect clicks precisely and worked with more confidence. By comparison, using only eyes was stressful and error-prone.
Why Vibration and Sound Make a Difference
Vibration worked like a game controller’s rumble—an instant “success” signal. Moreover, sound cues confirmed actions. Together, these senses reduced guesswork and improved precision. However, processing all this information was mentally demanding. Therefore, although Full Mode improved performance, it also increased operator fatigue.
The Future of Robot Teleoperation Sensory Feedback
You might think this only matters in labs, but it’s the future of work. For example, surgeons may perform remote operations, or engineers may fix satellites from Earth. Clearly, robot teleoperation sensory feedback ensures tasks are precise, efficient, and safer. Additionally, engineering is no longer just about machinery—it’s about how humans interact with intelligent systems. Hence, psychology, physics, and neuroscience all play a role.
Final Thoughts on Robot Teleoperation Sensory Feedback
Adding vibration and auditory cues is a huge step for remote robots. Although mental workload remains a challenge, this technology improves precision and confidence. Soon, robots may operate almost like humans, feeling every click and connection. This sensory feedback could revolutionize teleoperation, making remote tasks safer and more intuitive than ever before.
Additionally, to stay updated with the latest developments in STEM research, visit ENTECH Online. Basically, this is our digital magazine for science, technology, engineering, and mathematics. Further, at ENTECH Online, you’ll find a wealth of information.
Reference
- Ohno, K., Nagano, H., & Yokokohji, Y. (2025). Beyond visual and force feedback: Role of vibrotactile and auditory cues in robot teleoperated assembly. Robotics, 15(2), 39. https://doi.org/10.3390/robotics15020039
- Author
- Latest Posts

Kottauppari Venkat Raghava
I am a technology-driven IT graduate with a strong passion for science and innovation. I am fascinated by how innovations like artificial intelligence, robotics, and emerging technologies are shaping our world. I specialize in analyzing complex scientific and technological research and presenting it in a clear, accessible way. My goal is to make science and technology understandable and engaging for students, tech enthusiasts, and professionals alike. By breaking down advanced concepts into simple, insightful narratives, I strive to inspire curiosity, learning, and innovation, helping readers stay informed about the breakthroughs that are shaping the future.




{kind=link}